I. Sistemos apžvalga
1. Projekto aplinkybės
Pastaraisiais metais neteisėtas krovininių transporto priemonių gabenimas keliais tapo rimta problema, keliančia pavojų nacionaliniam kelių eismo saugumui. Dėl to perkraunami greitkeliai ir tiltai, o tai labai sutrumpina kelių ir tiltų eksploatavimo laiką; tuo pačiu metu labai sumažėja transporto priemonių saugos koeficientas, nuolat kyla eismo įvykių; taip pat lengva sukelti transporto spūstis ir aplinkos taršą.
Visų lygių vyriausybės visoje šalyje nuolat didino pastangas kontroliuoti perkrautų kelių transporto priemonių gabenimą ir pasiekė svarbių laipsniškų rezultatų. Tačiau dėl sudėtingų socialinių ir ekonominių veiksnių nacionalinė perkrovų aptikimo situacija vis dar yra labai rimta, o paslėpti atsigavimo pavojai nėra pašalinti; valdymo rezultatų konsolidavimas ir nuolatinis perkrovų aptikimo darbo skatinimas vis dar patiria didelį spaudimą. Todėl perkrautų transporto priemonių gabenimo valdymas yra ilgalaikis ir kasdienis darbas, kurį reikia tęsti. Labai svarbu įtraukti perkrovų darbo valdymą į ilgalaikį mechanizmą. Jis taip pat atlieka teisinį atgrasomąjį vaidmenį perkrautų transporto priemonių atžvilgiu ir taip pat gali išplėsti savo funkcijas, kad tai taptų kelių inspekcija, kovotų su nelegalių vežimų operacijų atsitiktinumu ir laiku kontroliuotų bei panaikintų įvairias nelegalias vežimo operacijas, įskaitant perkrautus vežimus.
2. Svėrimo sistemos įvadas
Stacionarių sunkvežimių svarstyklių svėrimo principas – pastatyti visas transporto priemones ant svėrimo platformos, kad būtų galima pasverti visą transporto priemonę. Jos pasižymi dideliu svėrimo tikslumu ir aiškiais nacionaliniais standartais. Tačiau įprastos sunkvežimių svarstyklės gali matuoti tik visos transporto priemonės svorį, bet ne ašies svorį. Jos gali įvertinti, ar visa transporto priemonė yra perkrauta, bet negali įvertinti, ar ašies svoris yra perkrautas. Jos negali atitikti kelių administracijos reikalavimų, keliamų perkrautų transporto priemonių valdymui.
Šis planas apjungia mūsų įmonės ilgametę patirtį projektuojant ir gaminant perkrovos aptikimo įrangą bei jos praktinį pritaikymą įvairiuose šalies regionuose, atidžiai išnagrinėja įvairios perkrovos aptikimo įrangos naudojimą rinkoje ir visapusiškai atsižvelgia į specifinius greitkelių valdymo departamentų poreikius, susijusius su perkrauto transporto valdymu. Jame taikomos pažangios technologijos ir unikalios dizaino idėjos, siekiant sukurti dinamišką, didelio tikslumo transporto priemonės svorio ir ašių tipo aptikimo sistemą. Ji gali pasverti tiek ašių svorį, tiek bendrą svorį ir gali atskirti ašių tipą. Ašių svorio tikslumas taip pat gali būti gerokai padidintas.
2. Perkrovos ir viršijimo sistemos sudėtis
1. Sistemos funkcijos
Jis gali pasverti mažu greičiu pravažiuojančias transporto priemones ir automatiškai nustatyti, ar transporto priemonės svoris, ar ašies apkrova nėra perkrauta;
Jis gali aptikti ašių skaičių, ašių grupę, ašių svorį ir transporto priemonės svorį;
Jis gali pateikti išsamią transporto priemonės svėrimo informaciją, įskaitant ašies tipą, ašies svorį, ašies grupę ir bendrą svorį;
Jis gali perduoti svėrimo informaciją kompiuteriui per duomenų sąsają;
Pagrindinė sistemos dalis naudoja brandžią ir patikimą įrangą, kuri visa yra modulinės konstrukcijos, lengvai prižiūrima ir plečiama, užtikrinant aukštą sistemos patikimumą.
Sistemos programinė įranga yra brandi, labai patikima, duomenys yra išsamūs ir veiksmingi, jais galima visapusiškai dalytis, efektyviai gerinant darbo efektyvumą ir kuo labiau pašalinant įvairias valdymo spragas.
2. Sistemos procesas
Sunkvežimis įvedamas į perkrovos stoties svėrimo taką, o valstybinio numerio atpažinimo sistema identifikuoja valstybinį numerį;
Padangos (ašies) identifikatorius nurodo ašių skaičių, o transporto priemonės svėrimo sistema pradeda sverti, nustatyti ašių grupę ir apskaičiuoti ašies svorį.
Kai visos transporto priemonės pravažiuoja pro transporto priemonių separatorių ir patenka į svėrimo platformą, o svarstyklės yra santykinai subalansuotos, užregistruojamas bendras transporto priemonės svoris ir apskaičiuojamas ašies svoris.
Svėrimo sistema siunčia svėrimo informaciją (automobilio numerio ženklą, ašių skaičių, ašių svorį, bendrą transporto priemonės svorį ir kt.) į aptikimo kompiuterį. Kompiuteris nustato, ar viršijamas leistinas svoris, ir ekrane rodo aptikimo informaciją, pvz., transporto priemonės svorį, viršijimo ribą ir viršijimo dažnį.
Transporto priemonei atlikus atitinkamas operacijas, transporto priemonės gido personalas atleidžia neriboto greičio transporto priemones išvažiuoti iš aptikimo zonos pagal ekrane rodomą informaciją, nukreipia riboto greičio transporto priemones į stoties zoną apdorojimui, atsispausdina riboto greičio transporto priemonės patikrinimo formą ir atlieka atitinkamas įkrovimo operacijas;
3. Sistemos sudėtis ir išdėstymo planas
3.1 Sistemos sudėtis
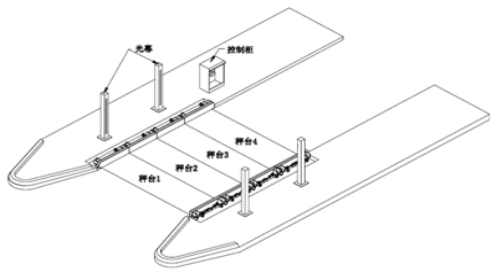
Viršijimo ir perkrovos sistemą sudaro ZDG keturių stalų dinaminės ašių svarstyklės, valdymo prietaisas, infraraudonųjų spindulių transporto priemonės separatorius, svėrimo platformos ratų ašių identifikatorius, valdymo spinta (papildoma įranga: numerio ženklo atpažinimo sistema, didelio LED ekrano rodymo sistema, balso komandų sistema, transporto priemonės valdymo sistema, pramoninis kompiuteris, bilietų spausdintuvas, UPS nepertraukiamo maitinimo šaltinis, viršijimo ir perkrovos aptikimo sistemos programinė įranga, stebėjimo sistema) ir kiti priedai bei kabeliai.
3.2 Sistemos išdėstymo schema, kaip parodyta:
Darbo eiga:
1) Transporto priemonės įvažiuoja į eismo juostą paeiliui, išlaikydamos saugų atstumą, įjungdamos infraraudonųjų spindulių transporto priemonių separatorių;
2) Kiekviena transporto priemonės ašis eina per daugiapaviršinę svėrimo platformą;
3) Ekrano valdiklis apdoroja svėrimo signalą, gautą iš svėrimo platformos jutiklio, ir rato jutiklio signalą, atskiria ašį pagal logines sąlygas ir efektyviai tvarko ypatingas situacijas;
4) Transporto priemonės galas palieka daugiapaviršinę svėrimo platformą ir infraraudonųjų spindulių transporto priemonės separatorių;
5) Ekrano valdiklis išsamiai įvertina transporto priemonės pabaigos signalą, remdamasis infraraudonųjų spindulių transporto priemonės separatoriaus aptiktu uždengimo signalu ir svėrimo jutiklio gautu svėrimo signalu;
6) Ekrano valdiklis apdoroja svėrimo signalą, gautą, kai minėta transporto priemonė pravažiuoja pro svėrimo platformą;
7) Ekrano valdiklis suformuoja išsamią visos transporto priemonės svėrimo informaciją, o visa svėrimo informacija apima transporto priemonės greitį, ašies tipą, ašies svorį, ašių grupės svorį, bendrą svorį ir kt.;
8) Užbaikite vienos transporto priemonės svėrimo procesą ir laukite, kol bus pasverta kita transporto priemonė.
9) Viso darbo proceso metu sistema automatiškai tvarko įvairias specialias situacijas, tokias kaip visiškas įėjimas ir visiškas išėjimas, pakartotinis įėjimas ir išėjimas bei ilgas buvimas svėrimo platformoje;
Sistema gali automatiškai ir efektyviai valdyti kitą transporto priemonės svėrimo situaciją, o kitos transporto priemonės svėrimas neturi įtakos duomenų tikslumui.

Įrašo laikas: 2025 m. vasario 20 d.